
l298n驅動電機的工作原理_L298N驅動步進電機程序
2020-7-25 14:07:28??????點擊:
[導讀] 步進電機簡介 步進電動機是一種將電脈沖信號轉換成角位移或線位移的機電元件。步進電動機的輸入量是脈沖序列,輸出量則為相應的增量位移或步進運動。正常運動情況下,它每轉一周具有固定的步
步進電機簡介
步進電動機是一種將電脈沖信號轉換成角位移或線位移的機電元件。步進電動機的輸入量是脈沖序列,輸出量則為相應的增量位移或步進運動。正常運動情況下,它每轉一周具有固定的步數;做連續步進運動時,其旋轉轉速與輸入脈沖的頻率保持嚴格的對應關系,不受電壓波動和負載變化的影響。由于步進電動機能直接接受數字量的控制,所以特別適宜采用微機進行控制。
(一)步進電機的種類
目前常用的有三種步進電動機:
(1)反應式步進電動機(VR)反應式步進電動機結構簡單,生產成本低,步距角小;但動態性能差。
(2)永磁式步進電動機(PM)永磁式步進電動機出力大,動態性能好;但步距角大。
(3)混合式步進電動機(HB)混合式步進電動機綜合了反應式、永磁式步進電動機兩
者的優點,它的步距角小,出力大,動態性能好,是目前性能最高的步進電動機。它有時也稱作永磁感應子式步進電動機。
(二)步進電動機的工作原理
圖X1三相反應式步進電動機結構示意圖
l298n驅動電機的工作原理_L298N驅動步進電機程序
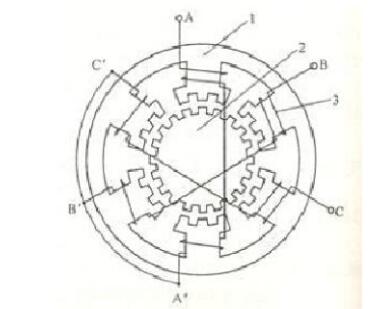
1——定子 2——轉子 3——定子繞組
圖x1是最常見的三相反應式步進電動機的剖面示意圖。電機的定子上有六 個均布的磁極,其夾角是60o。各磁極上套有線圈,按圖1連成A、B、C三相繞組。轉子上均布40個小齒。所以每個齒的齒距為θE=360o/40=9o,而定子每個磁極的極弧上也有5個小齒,且定子和轉子的齒距和齒寬均相同。由于定子和轉子的小齒數目分別是30和40,其比值是一分數,這就產生了所謂的齒錯位的情況。若以A相磁極小齒和轉子的小齒對齊,如圖,那么B相和C相磁極的齒就會分別和轉子齒相錯三分之一的齒距,即3o。因此,B、C極下的磁阻比A磁極下的磁阻大。若給B相通電,B相繞組產生定子磁場,其磁力線穿越B相磁極,并力圖按磁阻最小的路徑閉合,這就使轉子受到反應轉矩(磁阻轉矩)的作用而轉動,直到B磁極上的齒與轉子齒對齊,恰好轉子轉過3o;此時A、C磁極下的齒又分別與轉子齒錯開三分之一齒距。接著停止對B相繞組通電,而改為C相繞組通電,同理受反應轉矩的作用,轉子按順時針方向再轉過3o。
依次類推,當三相繞組按A→B→C→A順序循環通電時,轉子會按順時針方向,以每個通電脈沖轉動3o的規律步進式轉動起來。若改變通電順序,按A→C→B→A順序循環通電,則轉子就按逆時針方向以每個通電脈沖轉動3o的規律轉動。因為每一瞬間只有一相繞組通電,并且按三種通電狀態循環通電,故稱為單三拍運行方式。單三拍運行時的步矩角θb為30o。三相步進電動機還有兩種通電方式,它們分別是雙三拍運行,即按AB→BC→CA→AB順序循環通電的方式,以及單、雙六拍運行,即按A→AB→B→BC→C→CA→A順序循環通電的方式。六拍運行時的步矩角將減小一半。反應式步進電動機的步距角可按下式計算:
θb=360o/NEr(x-1)
式中 Er——轉子齒數, N——運行拍數,N=km,m為步進電動機的繞組相數,k=1或2。
(三)步進電動機的特性
(1)步進電動機必須加驅動才可以運轉,驅動信號必須為脈沖信號,沒有脈沖信號的時候,步進電動機靜止,如果加入適當的脈沖信號,就會以一定的角度(稱為步角)轉動。轉動的速度和脈沖的頻率成正比。
(2)步進電機具有瞬間啟動和急速停止的優越特性。 (3)改變脈沖的順序,可以方便的改變轉動的方向。
l298n驅動電機的工作原理
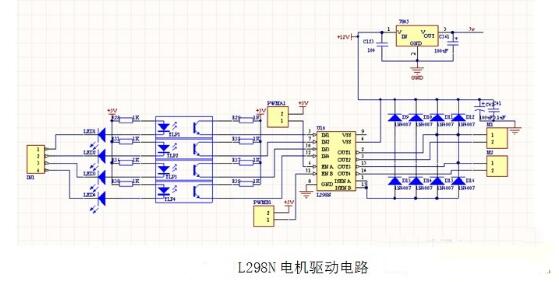
工作原理分析:
在步進電機驅動模塊中,采用了帶光耦隔離,抗干擾能力強的TLP521作為隔離電流保護芯片,其中L297的17腳通過給高低電平來控制步進電機的正反轉,而18腳為步進時鐘輸入端,控制每個步數的時間增量,19腳步進電機的半步或者整步的選擇,10腳為使能控制端,來控制電機的啟停,而經過內部包含 4 信道邏輯驅動電路、高壓、大電流雙 H 橋式驅動器L298來控制電機的正反轉;利用L298實現電機驅動及其正反轉,并采用二極管進行續流保護,利用7805提供5v電源給控制器和l298芯片供電,這個電路在工作時間長的情況下容易發熱,造成電路不穩定性缺點。
l298n驅動電機的工作原理_L298N驅動步進電機程序
主要功能特點是:
關鍵芯片:L298N 雙H 橋直流/步進電機驅動芯片
L298N 芯片工作電壓:DC 4.5~5.5V。
電機驅動電源電壓DC 5--35V。
電源輸入正常時有LED 燈指示。
PCB尺寸:4.4*5.0cm
最大輸出電流2A(瞬間峰值電流3A),最大輸出功率25W。
輸出正常時電機運轉有LED 燈指示。
具有二極管續流保護。
可單獨控制2臺直流電機或1臺兩相4 線(或6 線)步進電機。
可以采用并聯接法控制一臺高達3A 的直流電機。
可實現電機正反轉。
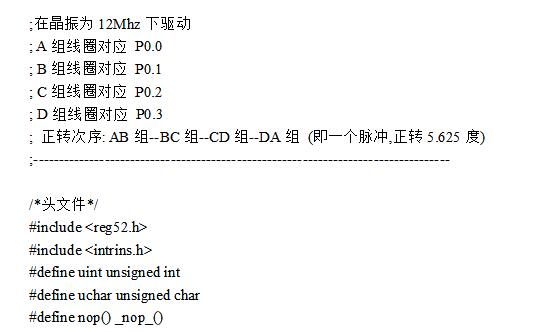
L298N驅動步進電機程序
步進電機簡介
步進電動機是一種將電脈沖信號轉換成角位移或線位移的機電元件。步進電動機的輸入量是脈沖序列,輸出量則為相應的增量位移或步進運動。正常運動情況下,它每轉一周具有固定的步數;做連續步進運動時,其旋轉轉速與輸入脈沖的頻率保持嚴格的對應關系,不受電壓波動和負載變化的影響。由于步進電動機能直接接受數字量的控制,所以特別適宜采用微機進行控制。
(一)步進電機的種類
目前常用的有三種步進電動機:
(1)反應式步進電動機(VR)反應式步進電動機結構簡單,生產成本低,步距角小;但動態性能差。
(2)永磁式步進電動機(PM)永磁式步進電動機出力大,動態性能好;但步距角大。
(3)混合式步進電動機(HB)混合式步進電動機綜合了反應式、永磁式步進電動機兩
者的優點,它的步距角小,出力大,動態性能好,是目前性能最高的步進電動機。它有時也稱作永磁感應子式步進電動機。
(二)步進電動機的工作原理
圖X1三相反應式步進電動機結構示意圖
l298n驅動電機的工作原理_L298N驅動步進電機程序
1——定子 2——轉子 3——定子繞組
圖x1是最常見的三相反應式步進電動機的剖面示意圖。電機的定子上有六 個均布的磁極,其夾角是60o。各磁極上套有線圈,按圖1連成A、B、C三相繞組。轉子上均布40個小齒。所以每個齒的齒距為θE=360o/40=9o,而定子每個磁極的極弧上也有5個小齒,且定子和轉子的齒距和齒寬均相同。由于定子和轉子的小齒數目分別是30和40,其比值是一分數,這就產生了所謂的齒錯位的情況。若以A相磁極小齒和轉子的小齒對齊,如圖,那么B相和C相磁極的齒就會分別和轉子齒相錯三分之一的齒距,即3o。因此,B、C極下的磁阻比A磁極下的磁阻大。若給B相通電,B相繞組產生定子磁場,其磁力線穿越B相磁極,并力圖按磁阻最小的路徑閉合,這就使轉子受到反應轉矩(磁阻轉矩)的作用而轉動,直到B磁極上的齒與轉子齒對齊,恰好轉子轉過3o;此時A、C磁極下的齒又分別與轉子齒錯開三分之一齒距。接著停止對B相繞組通電,而改為C相繞組通電,同理受反應轉矩的作用,轉子按順時針方向再轉過3o。
依次類推,當三相繞組按A→B→C→A順序循環通電時,轉子會按順時針方向,以每個通電脈沖轉動3o的規律步進式轉動起來。若改變通電順序,按A→C→B→A順序循環通電,則轉子就按逆時針方向以每個通電脈沖轉動3o的規律轉動。因為每一瞬間只有一相繞組通電,并且按三種通電狀態循環通電,故稱為單三拍運行方式。單三拍運行時的步矩角θb為30o。三相步進電動機還有兩種通電方式,它們分別是雙三拍運行,即按AB→BC→CA→AB順序循環通電的方式,以及單、雙六拍運行,即按A→AB→B→BC→C→CA→A順序循環通電的方式。六拍運行時的步矩角將減小一半。反應式步進電動機的步距角可按下式計算:
θb=360o/NEr(x-1)
式中 Er——轉子齒數, N——運行拍數,N=km,m為步進電動機的繞組相數,k=1或2。
(三)步進電動機的特性
(1)步進電動機必須加驅動才可以運轉,驅動信號必須為脈沖信號,沒有脈沖信號的時候,步進電動機靜止,如果加入適當的脈沖信號,就會以一定的角度(稱為步角)轉動。轉動的速度和脈沖的頻率成正比。
(2)步進電機具有瞬間啟動和急速停止的優越特性。 (3)改變脈沖的順序,可以方便的改變轉動的方向。
l298n驅動電機的工作原理
工作原理分析:
在步進電機驅動模塊中,采用了帶光耦隔離,抗干擾能力強的TLP521作為隔離電流保護芯片,其中L297的17腳通過給高低電平來控制步進電機的正反轉,而18腳為步進時鐘輸入端,控制每個步數的時間增量,19腳步進電機的半步或者整步的選擇,10腳為使能控制端,來控制電機的啟停,而經過內部包含 4 信道邏輯驅動電路、高壓、大電流雙 H 橋式驅動器L298來控制電機的正反轉;利用L298實現電機驅動及其正反轉,并采用二極管進行續流保護,利用7805提供5v電源給控制器和l298芯片供電,這個電路在工作時間長的情況下容易發熱,造成電路不穩定性缺點。
l298n驅動電機的工作原理_L298N驅動步進電機程序
主要功能特點是:
關鍵芯片:L298N 雙H 橋直流/步進電機驅動芯片
L298N 芯片工作電壓:DC 4.5~5.5V。
電機驅動電源電壓DC 5--35V。
電源輸入正常時有LED 燈指示。
PCB尺寸:4.4*5.0cm
最大輸出電流2A(瞬間峰值電流3A),最大輸出功率25W。
輸出正常時電機運轉有LED 燈指示。
具有二極管續流保護。
可單獨控制2臺直流電機或1臺兩相4 線(或6 線)步進電機。
可以采用并聯接法控制一臺高達3A 的直流電機。
可實現電機正反轉。
L298N驅動步進電機程序
- 上一篇:xMEMS推出業界首款單芯片MEMS音箱 2020/7/26
- 下一篇:蘋果之后,三星也表態了:無意拿下ARM 2020/7/25
